Tennis court line detector: Part 2, training a CNN

Synthetic data settings
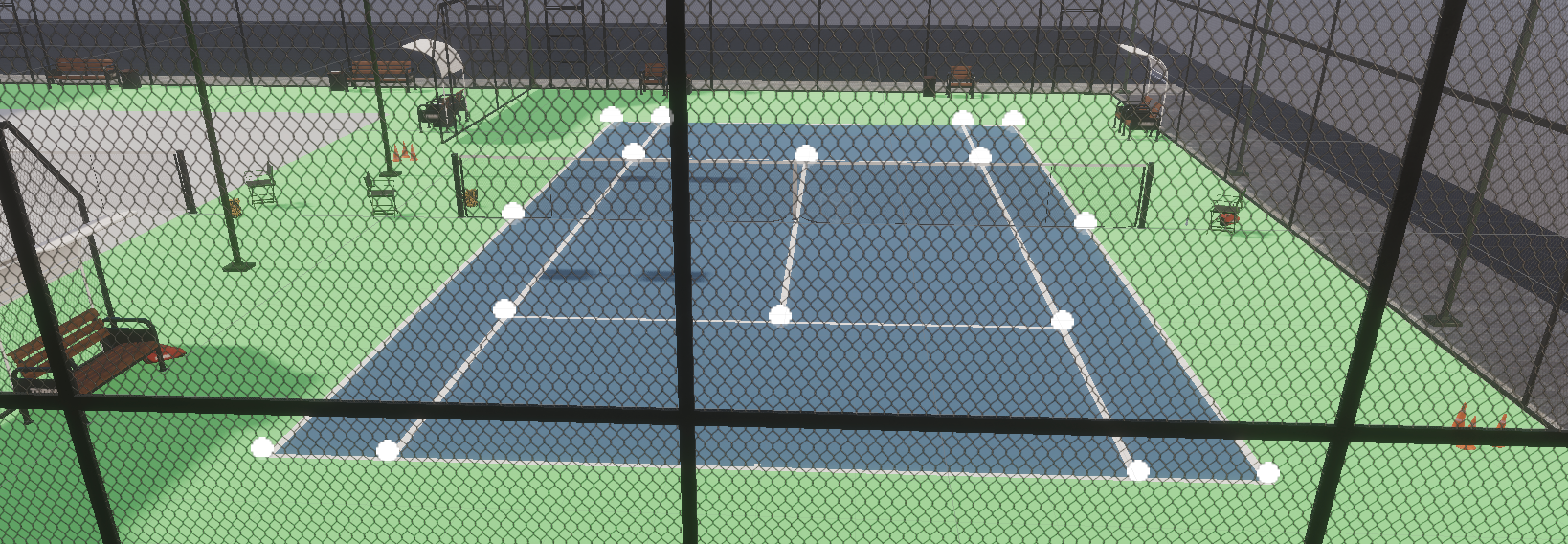
To recap part 1, we built a synthetic data generator for tennis courts with labeled keypoints.
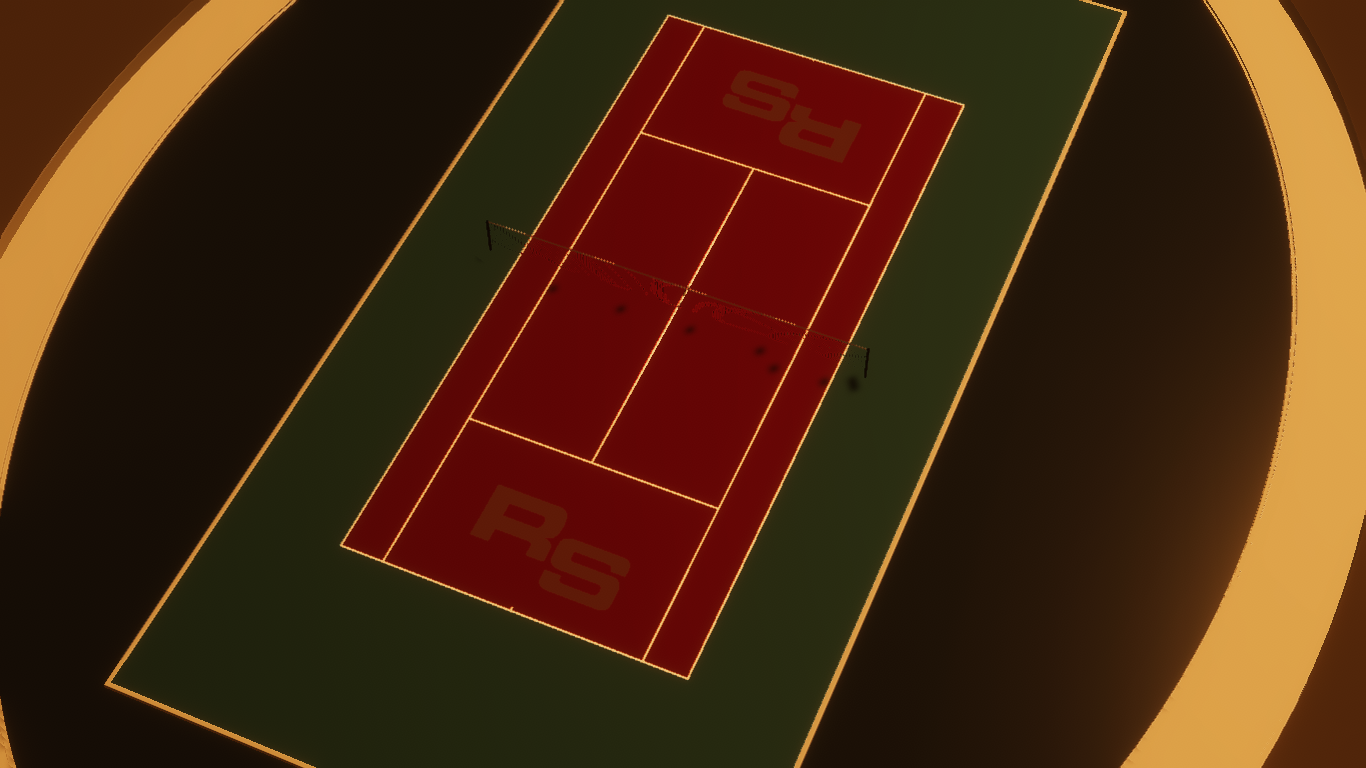
with corresponding annotations in the SOLO JSON format.
Here are the randomizer settings:
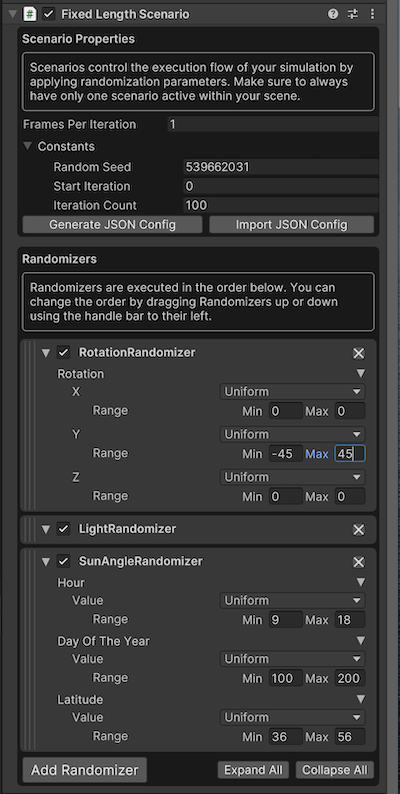
Note that the rotation randomizer only makes relatively small rotations to spin the court on the y axis by -45 to 45 degrees. This is to keep the problem easy for the first iteration. This constrained rotation keeps the "front" keypoints in the front of the images, and the "back" keypoints in the back of the image, otherwise the network may have problems converging. If it was rotated 180 degrees, the data generator would somehow have to flip the keypoints, which seems difficult.
There are a few lighting randomizers, and note that only 100 images are generated.
Deciding on an architecture
Let's start with a simple architecture: VGG16 pre-trained on ImageNet.
We'll remove the VGG16 final layer with 1000 outputs and replace it with a fully connected layer (head) that has 16 * 2 outputs. For each keypoint:
- X position
- Y position
Later we'll generate harder images where some keypoints aren't visible, and add a "Visibility Status" output for training and prediction.
Defining the model
To begin with, we'll try to overfit the model on the training data, as described in Andrej Karpathy's A Recipe for Training Neural Networks. Since we're trying to overfit, for now we'll remove all regularization, such as dropout layers. Later when trying to regularize, we'll look into re-adding these.
To avoid having to deal with bugs in training loop code, define the model in a pytorch lightning module.
class LitVGG16(pl.LightningModule):
def __init__(self, num_epochs):
super().__init__()
self.num_epochs = num_epochs
# Create a VGG16 network
self.vgg16 = torch.hub.load('pytorch/vision:v0.6.0', 'vgg16', pretrained=True)
# x,y coordinates of the 16 keypoints
num_out_features = 16 * 2
# Freeze the weights of all the CNN layers
for param in self.vgg16.features.parameters():
param.requires_grad = False
# Redefine the classifier to remove the dropout layers
self.vgg16.classifier = nn.Sequential(
nn.Linear(25088, 4096),
nn.ReLU(inplace=True),
nn.Linear(4096, 4096),
nn.ReLU(inplace=True),
nn.Linear(4096, num_out_features)
)
def forward(self, x):
y_pred = self.vgg16(x)
return y_pred
def training_step(self, batch, batch_idx):
x, y = batch
y_pred = self(x)
loss = torch.nn.functional.mse_loss(y_pred, y)
self.log('train_loss', loss, prog_bar=True)
# Log the learning rate
scheduler = self.lr_schedulers()
current_lr = scheduler.get_last_lr()[0]
self.log("learning_rate", current_lr, prog_bar=True)
return loss
def configure_optimizers(self):
optimizer = optim.Adam(self.parameters(), lr=1e-3)
# Define a learning rate scheduler
scheduler = optim.lr_scheduler.CosineAnnealingLR(
optimizer,
T_max=self.num_epochs,
eta_min=1e-5
)
return [optimizer], [scheduler]Building a pytorch dataset
Since the annotations are generated in the SOLO JSON format, we'll need a custom dataset that knows how to read this format.
class TennisCourtDataset(torch.utils.data.Dataset):
def __init__(self, data_path, transform=None):
self.data_path = data_path
solo = Solo(data_path=data_path)
# Preload all frames to allow for random access
self.solo_frames = [frame for frame in solo.frames()]
def __len__(self):
return len(self.solo_frames)
def __getitem__(self, idx):
solo_frame = self.solo_frames[idx]
# Each frame has a list of a single capture
capture = solo_frame.captures[0]
# Figure out the filepaths for the image
sequence = solo_frame.sequence
capture_img_file_path = f"sequence.{sequence}/{capture.filename}"
# Load the image and convert it to the appropriate tensor
img_tensor, img_size = TennisCourtImageHelper.imagepath2tensor(
self.data_path,
capture_img_file_path,
TennisCourtImageHelper.img_rescale_size
)
# Get a reference to the keypoint annotations
annotations = capture.annotations
keypoint_annotations = annotations[0]
keypoints = keypoint_annotations.values[0].keypoints
if len(keypoints) != 16:
raise Exception("Expected 16 keypoints")
# Extract the x,y values into a nested list
keypoint_tuples = [
(kp.location[0], kp.location[1]) for kp in keypoints
]
# Rescale the keypoints to match the rescaled image
rescaled_keypoints = TennisCourtImageHelper.rescale_keypoint_coordinates(
keypoint_tuples,
img_size,
TennisCourtImageHelper.img_rescale_size
)
# Flatten the nested list
flattened_rescaled_keypoints = [
element for sublist in rescaled_keypoints for element in sublist
]
# Convert the list to a tensor
keypoints_tensor = torch.tensor(flattened_rescaled_keypoints)
return img_tensor, keypoints_tensorThe full code including the helper functions are available in https://github.com/tleyden/tennis_court_cnn
A few notes on the above snippet:
- The image is resized to 224 x 224
- The keypoints are extracted and then rescaled to match the target image size of 224 x 224. Without this, the keypoints will be in the wrong place in the image!
Train the model
dataset = TennisCourtDataset(data_path=data_path)
# Create the dataloader and specify the batch size
train_loader = utils.data.DataLoader(
dataset,
batch_size=32,
shuffle=True
)
# Create the lightning module
litvgg16 = LitVGG16(num_epochs=50)
trainer = pl.Trainer(
callbacks=[checkpoint_callback],
max_epochs=num_epochs,
logger=wandb_logger,
log_every_n_steps=10
)
trainer.fit(model=litvgg16, train_dataloaders=train_loader)Add visualization to wandb logging
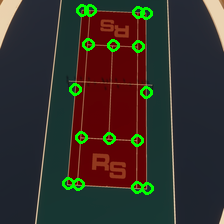
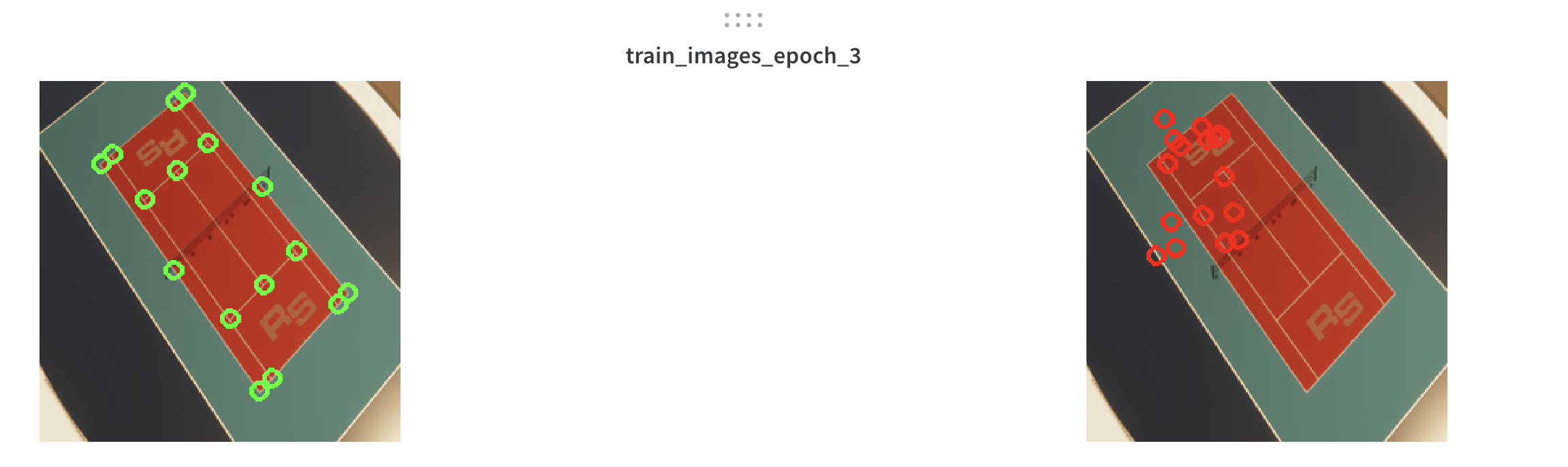
In order to visualize how the network is performing, let's draw both the ground truth and predicted keypoints on top of the image using opencv.
@staticmethod
def add_keypoints_to_image(pil_image: Image, kps: List[float], color: tuple[int]) -> Image:
# Convert each float -> int
kps = [int(round(kp)) for kp in kps]
# Convert the flattened keypoints to a list of tuples
keypoint_pairs = [
(kps[i], kps[i + 1]) for i in range(0, len(kps), 2)
]
# Convert the image to opencv format
opencv_image = cv2.cvtColor(
np.array(pil_image), cv2.COLOR_RGB2BGR
)
for keypoint_pair in keypoint_pairs:
center_coordinates = keypoint_pair # (x, y) coordinates of the center
thickness = 2 # Thickness of the circle's outline
radius = 5 # Radius of the circle
# Draw the circle on the image
cv2.circle(opencv_image, center_coordinates, radius, color, thickness)
# Convert the image back to PIL format
pil_image = Image.fromarray(
cv2.cvtColor(opencv_image, cv2.COLOR_BGR2RGB)
)
return pil_imageand during training, log two separate images with the ground truth and predicted keypoints projected to wandb media:
def training_step(self, batch, batch_idx):
.. snip ..
# Log the first image of the first batch of each epoch
if batch_idx == 0:
first_img_in_batch = x[0]
# Convert the tensor to a PIL image
pil_image = ToPILImage()(first_img_in_batch)
# Show green keypoints for the ground truth and red keypoints for the predicted keypoints
pil_image_ground_truth = add_keypoints_to_image(
pil_image, y[0].tolist(), color=(0, 255, 0)
)
pil_image_predicted = add_keypoints_to_image(
pil_image, y_pred[0].tolist(), color=(0, 0, 255)
)
wandb.log(
{f"train_images_epoch_{self.current_epoch}":
[wandb.Image(pil_image_ground_truth), wandb.Image(pil_image_predicted)]}
)
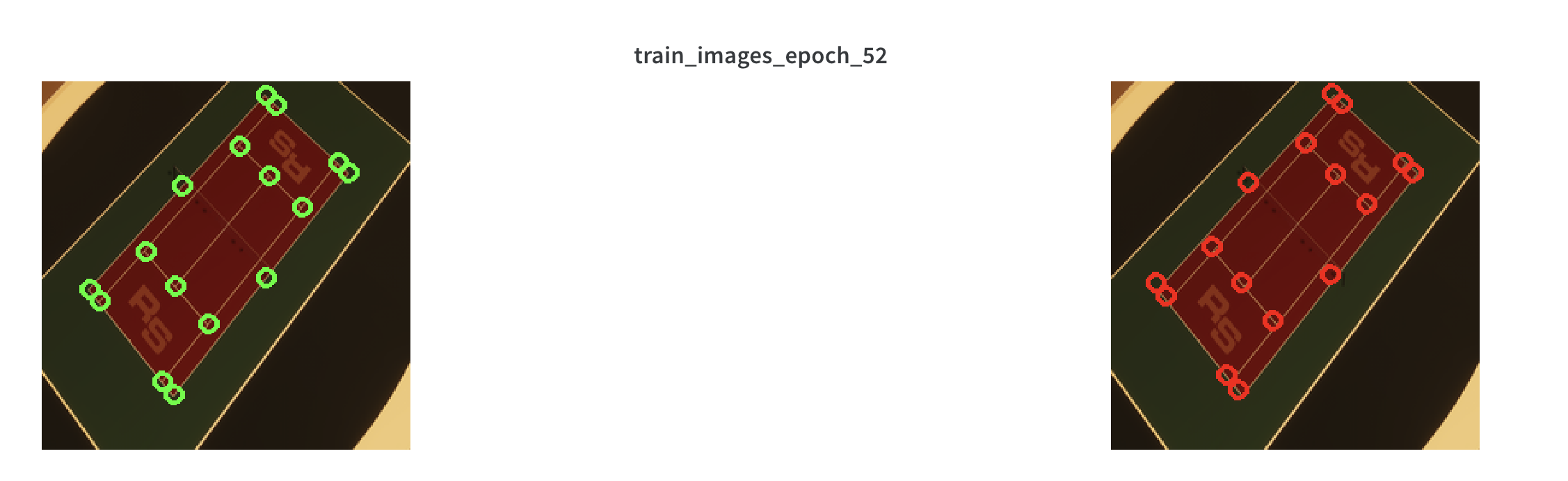
return lossNow when training, the wandb UI will visually show the network learning:
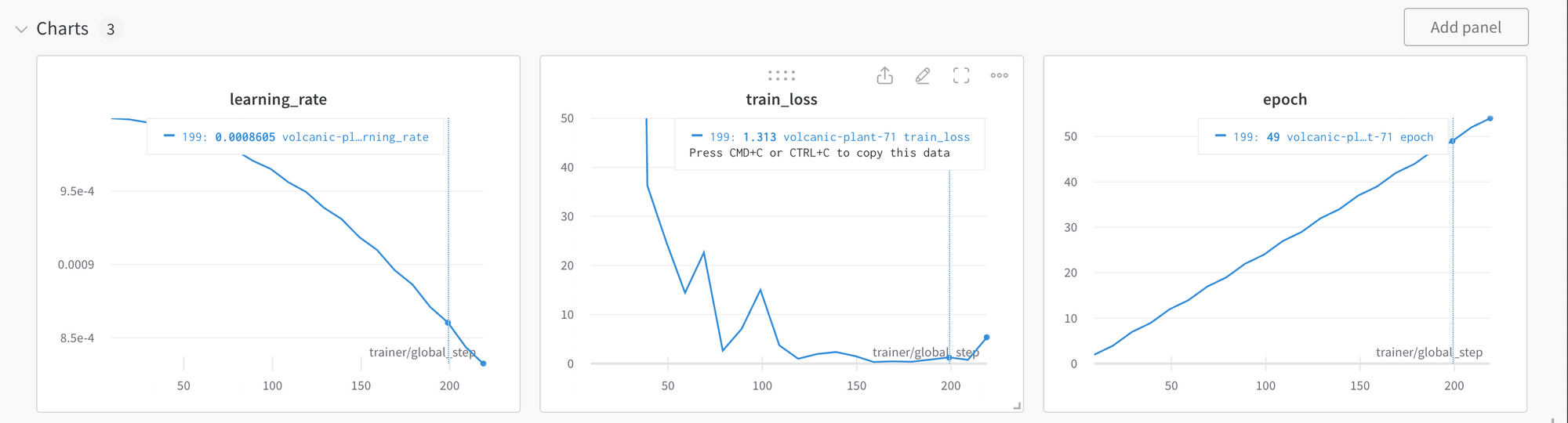
Run the training + analyzing the result
After 54 epochs the training loss (Mean Squared Error) has converged to a very low number (close to 1.0). This
Revisiting some design decisions
Should we train from scratch vs using a pre-trained network? According to this reddit thread the consensus is that training from scratch on with synthetic datasets followed by fine-tuning works better than transfer learning on pre-trained networks.
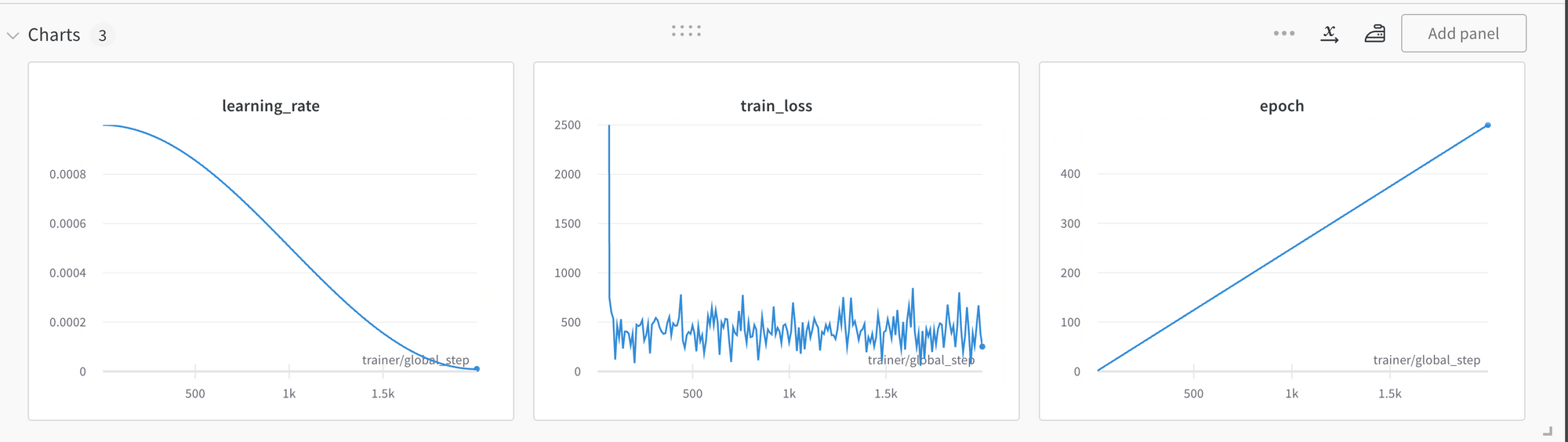
However, I initially I tried training from scratch, but the network could not handle rotations.
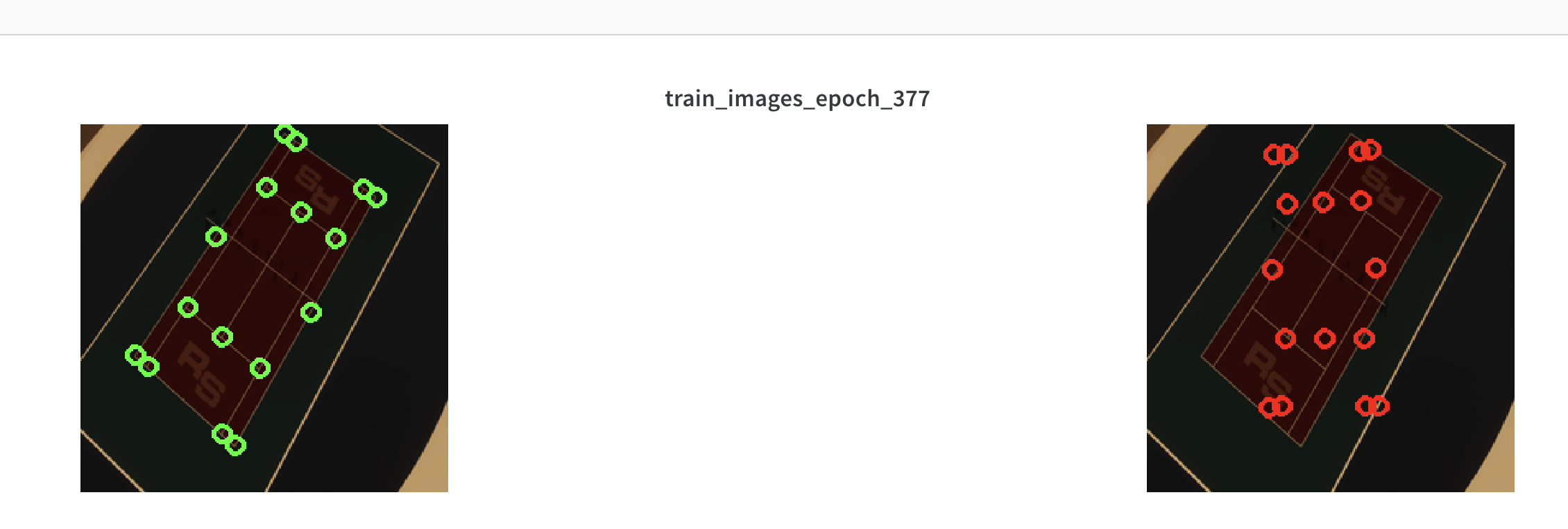
and the loss did not appear to converge even after 400+ epochs:
Some ideas on why this didn't work:
- Serious bug - this seems to be the case, because in later parts of this blog series training from scratch yielded reasonable results
- Not enough data samples
- Not enough variety within data samples
You might also be wondering, when using a pre-trained network, shouldn't the images be normalized?
With VGG16, since it doesn't have any batchnorm layers, the answer appears to be yes. Going forward I will add this to the dataset class:
# Normalize the image on the pretrained model's mean and std
normalized_image = torchvision.transforms.Normalize(
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])(resized_image)Recap
In this part we've used transfer learning to achieve an MSE loss of ~ 1.0 pixels on a small synthetic dataset.
We've also built visualizations to help assess the network progress during training.
In the part 3 we'll make the dataset a bit harder and introduce occluded keypoints, and improve the network to handle these.